Рис. %img:chng_l
| [Home] | [Donate!] [Контакты] |
Классический метод обнаружения скрытых предметов состоит в использовании эффекта влияния объектов из проводящих и ферромагнитных материалов на параметры расположенной рядом катушки или системы из нескольких катушек индуктивности (рис. %img:chng_l).
Следует отметить, что это не единственный способ. Предметы из ферромагнитных материалов могут быть также обнаружены по создаваемому ими локальному искажению магнитного поля Земли, которое можно выявить с помощью чувствительного магнитометра. Металлоискатели на основе магнитометра показывают очень хорошие результаты - крупные объекты из ферромагнетиков с их помощью возможно обнаружить на глубине до нескольких метров. Но они не универсальны - большинство металлов, в том числе наиболее "интересные" - медь, серебро, золото, их сплавы - не обладают сколь либо выраженными магнитными свойствами и не могут быть обнаружены указанным способом (не могут быть обнаружены пассивными приборами, но могут - активными, имеющими дополнительный возбудитель тока в объектах поиска). В этой статье рассмотрим наиболее универсальный первый метод обнаружения, с помощью датчика - катушки.
Оглавление
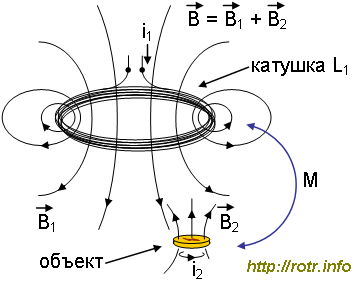
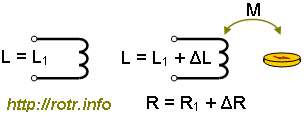
Известно, что проводящий предмет уменьшает индуктивность расположенной рядом катушки. Эффект в чём-то подобен влиянию на катушку короткозамкнутого витка и объясняется следующим образом (рис. %img:ec1). За счёт протекания переменного тока i1 через катушку L1, вокруг неё создаётся переменное магнитное поле (B1). Под действием переменного магнитного поля в находящихся рядом проводящих телах возникают вихревые токи. Вихревые токи, в свою очередь, создают своё магнитное поле (B2); результирующее поле складывается из магнитного поля катушки и магнитного поля вихревых токов в проводящем предмете (B = B1 + B2). В итоге, магнитный поток, пронизывающий катушку, при наличии рядом проводящего предмета оказывается отличающемся по амплитуде и фазе от магнитного потока при отсутствии предмета (при одних и тех же параметрах переменного тока i1 через катушку). Это эквивалентно изменению индуктивности и активного сопротивления самой катушки. Эффект обычно крайне слаб, но может быть обнаружен с помощью точных измерений. Численные оценки эффекта будут выполнены далее.
Объекты из ферромагнитных материалов также влияют на индуктивность находящейся рядом катушки, увеличивая её. Благодаря этому они также могут быть обнаружены по изменению индуктивности катушки-датчика. Причём по знаку изменения индуктивности мы можем легко отличить ферромагнитные материалы от материалов, не являющихся ферромагнитными. Правда, если материал является и ферромагнитным, и проводящим (например, железо и многие его сплавы), то будут одновременно проявляться оба эффекта. Какой из них будет преобладать, зависит от частоты тока в катушке, от размеров и формы предмета, от взаимного расположения катушки и предмета. В принципе, даже для одного и того же предмета возможно изменение знака отклонения индуктивности в зависимости от условий. Но на низких рабочих частотах для не слишком массивных предметов можно ожидать преобладания эффекта увеличения индуктивности.
Задачу поиска металлических предметов мы свели к задаче выявления малых изменений индуктивности катушки-датчика, для решения которой существует несколько способов. В зависимости от выбранного решения, получим один из видов металлоискателя: металлоискатель - измеритель частоты (например, простейший, "на биениях" или более сложный - на основе цифрового частотомера); индукционный металлоискатель; металлоискатель типа "передача-приём"; импульсный металлоискатель.
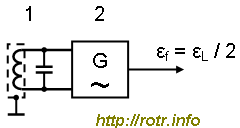
Вероятно, наиболее простой способ обнаружения малых отклонений индуктивности состоит в преобразовании изменений индуктивности в изменение частоты (рис. %img:md_fm_b). Для этого катушку включают в состав колебательного контура 1, который задаёт частоту автогенератора 2; отклонения индуктивности катушки от начального значения будут приводить к отклонениям частоты генерации.
Здесь и далее предполагается, что катушка металлоискателя экранирована, как показано на схеме. Это обязательное условие, иначе изменения паразитной ёмкости катушки при приближении её к проводящим предметам, в том числе и плохо проводящим (грунт, тело самого оператора прибора) и даже диэлектрикам (из-за неединичной диэлектрической проницаемости) будут вызывать отклик, намного превышающий таковой от полезных целей. Экран вокруг катушки устраняет влияние на собственную ёмкость катушки окружающих предметов. Экран делают в виде тонкостенной оболочки вокруг обмотки катушки, обязательно с разрывом, чтобы не образовывался короткозамкнутый виток.
Можно показать, что относительное изменение частоты под влиянием объектов поиска примерно равно половине относительного изменения индуктивности, \(\varepsilon_f \approx \varepsilon_{{}_L}/2.\) Малые изменения частоты обнаружить сравнительно просто. Например, с помощью цифровых методов измерения частоты.
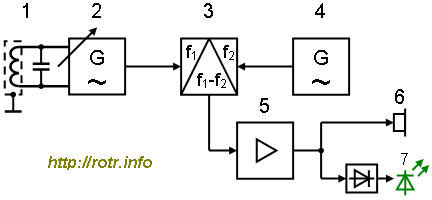
Возможна и чисто аналоговая реализация металлоискателя на основе измерения частоты, как в металлоискателях "на биениях", рис. %img:md_beat (сейчас они представляют скорее исторический интерес). Такие приборы имеют два генератора. К одному (генератор 2 на схеме) подключена катушка-датчик (включена в состав колебательного контура 1), от индуктивности которой зависит частота генерации. Также у этого генератора предусмотрена ручная подстройка, для установки его начальной частоты близкой к частоте второго - опорного генератора 4, который является образцовым (функцию подстройки можно перенести и в опорный генератор, но тогда нельзя будет использовать стабилизацию кварцевым резонатором). Сигналы с обоих генераторов поступают на смеситель 3 (сумматор + детектор), на выходе которого получаем сигнал с разностной частотой, который усиливается усилителем 5, откуда он поступает на наушники 6, а также может быть подан на светодиод 7 для визуализации низкочастотных разностных колебаний. Подстраивая один из генераторов, добиваются получения сигнала на выходе смесителя с минимальной частотой. При приближении катушки к предмету, происходит уход частоты первого генератора. Разностная частота изменяется на такое же значение по абсолютной величине, но относительное изменение оказывается большим и его легко обнаружить даже на слух.
Достоинство приборов "на биениях" состоит в их предельной простоте. Подобный металлоискатель может быть собран буквально на трёх транзисторах.
Основной недостаток - малая чувствительность, ограничиваемая минимальным обнаруживаемым на слух уходом частоты, составляющим единицы герц в лучшем случае. Кроме того, генераторы подобного металлоискателя, работающие на близких частотах, склонны к взаимной синхронизации из-за наличия паразитных связей между ними (через смеситель вследствие неидеальной развязки входов, через цепи питания, через паразитные ёмкости и взаимные индуктивности элементов схемы). Для предотвращения синхронизации приходится увеличивать начальную расстройку генераторов по частоте (чем сильнее связь между генераторами, тем сильнее должны отличаться их частоты, чтобы избежать синхронизации) или сильно усложнять конструкцию с целью минимизации связи генераторов. Увеличение начальной расстройки снижает и без того малую чувствительность металлоискателя, так как с ростом разностной частоты увеличивается та величина минимального ухода частоты, которую возможно обнаружить "на слух".
В связи с их недостатками, металлоискатели "на биениях" в настоящее время практически не используются, если не считать любительских приборов самого начального уровня.
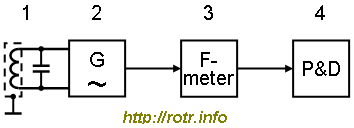
Гораздо лучшие результаты показывают приборы с цифровым измерением частоты (рис. %img:md_fm). На схеме: 1 - колебательный контур, в состав которого входит катушка металлоискателя и который определяет частоту генерации автогенератора 2; 3 - измеритель частоты, например реализованный на таймерах микроконтроллера, выходной сигнал данного блока - измеренное значение частоты в цифровой форме; 4 - устройства обработки и отображения информации, может включать в себя фильтры (для подавления медленно изменяющихся составляющих сигнала, связанных с самопроизвольным уходом частоты генераторов и быстро изменяющихся составляющих, обусловленных кратковременной нестабильностью генераторов), устройства для отображения информации на дисплее и синтеза звука. Большая часть узлов может быть реализована средствами одного микроконтроллера. Поэтому приборы данного типа также получаются в целом достаточно простыми, но при этом они лишены многих недостатков устройств "на биениях".
Во-первых, у них меньше проблем с паразитной синхронизацией генераторов, так как генератор 2 с катушкой-датчиком (в составе колебательного контура 1) и опорный генератор (генератор тактового сигнала, не обозначен на схеме) работают на сильно отличающихся частотах. Во-вторых, цифровой частотомер имеет очень хорошую разрешающую способность и без проблем можно добиться обнаружения отклонения частоты на величину 10-6 от начального значения, причём относительная чувствительность не зависит от частотного диапазона, что обеспечивает свободу в выборе рабочей частоты металлоискателя. Фактически, чувствительность такого металлоискателя ограничивается не возможностями частотомера, а кратковременной нестабильностью генераторов.
Однако есть и общие недостатки у всех разновидностей приборов данного типа. Прежде всего, исходя из самого принципа работы такого металлоискателя, невозможно жёстко зафиксировать рабочую частоту - она должна быть "плавающей" (что, например, затрудняет фильтрацию сигнала, полезную для уменьшения уровня помех). Перестройка частоты для работы в разных частотных диапазонах возможна, но сопряжена с усложнением конструкции и может ухудшить стабильность работы генератора и чувствительность металлоискателя. Невозможна работа одновременно на нескольких частотах, что важно для наиболее продвинутых приборов, так как позволяет получить максимум информации об объектах поиска. Кроме того, игнорируется величина вносимого активного сопротивления, которая несёт важную информацию об обнаруженном предмете.
Один из способов обнаружения малых отклонений индуктивности состоит в использовании компенсационных методов. В так называемых индукционных металлоискателях, сигнал с катушки-датчика складывается с опорным сигналом таким образом, чтобы при отсутствии рядом предметов, суммарный сигнал оказался нулевым. При приближении катушки к проводящему предмету, снимаемый с катушки сигнал изменяется, в то время как опорный сигнал остаётся прежним. Следовательно, суммарный сигнал оказывается отличным от нуля, он может быть усилен и измерен. Понятно, что малые отклонения суммарного сигнала относительно нуля обнаружить гораздо проще, чем малые отклонения сигнала с катушки на фоне огромного по сравнению с этими отклонениями основного сигнала.
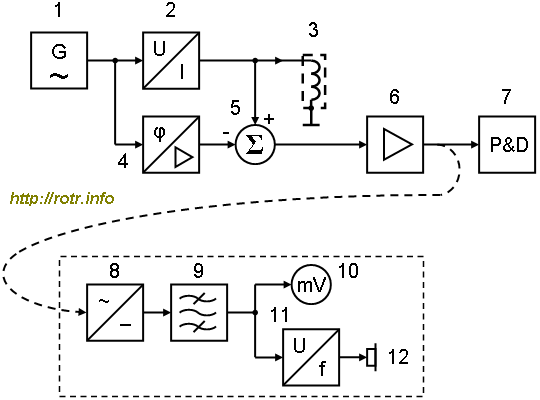
Структурная схема индукционного металлоискателя, который имеет одну катушку-датчик, а компенсация сигнала осуществляется электронными цепями, изображена на рис. %img:md_ind. Сигнал с задающего генератора 1 (стабилизированный генератор, для которого можно задать любую желаемою частоту) поступает на преобразователь напряжение-ток 2, к которому подключена катушка металлоискателя 3. Преобразователь 2 обеспечивает строгую пропорциональность тока через свою нагрузку (катушку) по отношению к входному напряжению (сигналу генератора). Параметры переменного тока через катушку, таким образом, являются фиксированными, а напряжение на катушке зависит от её полного сопротивления, которое изменяется при приближении к проводящему предмету. Если пренебречь активным сопротивлением, напряжение на катушке будет пропорционально её индуктивности. Но вообще, метод позволяет контролировать изменения, как индуктивности, так и активного сопротивления катушки без существенного усложнения схемы (для этого следует контролировать не только амплитуду напряжения на катушке, но и фазу относительно фазы задающего сигнала).
Кроме преобразователя, сигнал от генератора получает цепь масштабирования и фазового сдвига 4, за счёт которой, при соответствующей регулировке, можно получить сигнал в точности равный сигналу на катушке при отсутствии рядом посторонних предметов ("эквивалент катушки" в её начальном состоянии). Данный сигнал и сигнал с катушки подаются на сумматор (в данном случае - вычитающее устройство 5), на выходе которого получаем нулевое напряжение, когда рядом с катушкой нет посторонних предметов. Если приблизить катушку к металлическому предмету, компенсация нарушится и на выходе сумматора появится сигнал. Амплитуда получаемого сигнала мала (поскольку малы относительные изменения индуктивности катушки), поэтому сигнал усиливается усилителем 6 для обеспечения более высокой чувствительности. Усиленный сигнал подаётся на устройство обработки и отображения 7.
Также на схеме изображён простейший вариант устройства блока обработки и отображения сигнала. В данном случае он включает в себя: 8 - детектор для получения сигнала, пропорционального изменению индуктивности катушки из сигнала раскомпенсации (перед детектором может быть помещён полосовой фильтр, настроенный на частоту генератора для устранения помех, наведённых в катушке извне); 9 - фильтр, подавляющий низкочастотные составляющие полученного на выходе детектора сигнала (как правило, они обусловлены медленными изменениями индуктивности катушки и параметров схемы, не связанными с влиянием объектов поиска) и сравнительно высокочастотные составляющие (как правило, связаны с шумами схемы и кратковременной нестабильностью генератора). Полученный очищенный сигнал можно отобразить на индикаторе 10 (обычно требуется ещё логарифмический усилитель для обеспечения возможности отображения сигналов в широком диапазоне значений), а также на его основе синтезируется аудио сигнал для работы с прибором на слух (11, 12).
Индукционные металлоискатели имеют массу преимуществ по сравнению с металлоискателями на основе измерения частоты. В данном случае мы имеем полную свободу в выборе рабочей частоты - можем установить требуемое фиксированное значение частоты, можем переключаться между разными значениями (для разных задач оптимальные частоты различны). Даже возможно подать на катушку сигнал - сумму нескольких синусоидальных составляющих с разными частотами, в результате чего металлоискатель будет работать одновременно сразу на нескольких различных частотах, что используется в наиболее совершенных приборах, обеспечивая им максимум возможностей.
Кроме того, оказывается доступной информация не только об изменении индуктивности, но и об изменении активной составляющей сопротивления катушки под влиянием находящегося рядом предмета. Эта информация оказывается очень ценной для решения задач распознавания типа металла, фильтрации сигналов от ложных целей, компенсации влияния почвы.
Компенсация сигнала в начальном состоянии возможна не только электронными методами, типа рассмотренного выше, но и за счёт использования системы из нескольких катушек, сконструированной должным образом. В результате для металлоискателя оказывается достижимой ещё более высокая чувствительность.
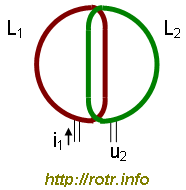
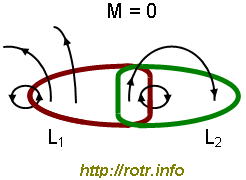
К этому типу можно отнести металлоискатели с довольно популярной сейчас катушкой DD-типа. DD-катушка состоит из двух одинаковых, симметрично расположенных и жёстко зафиксированных в общем корпусе обмоток, каждая из которых по форме напоминает букву "D" (рис. %img:dd_coil). Через одну обмотку пропускается переменный ток ("передающая" обмотка), со второй обмотки снимается сигнал, который подвергается усилению и обработке ("приёмная" обмотка). Обмотки частично перекрываются с таким расчётом, чтобы их взаимная индуктивность оказалась нулевой (в области перекрытия и вне её векторы индукции магнитного поля, создаваемого передающей обмоткой, направлены в противоположные стороны, поэтому подбирая площадь перекрытия, можно добиться нулевого магнитного потока через приёмную обмотку). Когда рядом с катушкой нет посторонних предметов, при пропускании переменного тока через "передающую" обмотку, ЭДС индукции в "приёмной" обмотке наводиться не будет* (рис. %img:dd_f1).
* Строго говоря, идеальная компенсация невозможна, и некоторый сигнал на приёмной катушке будет присутствовать, но он будет крайне мал по сравнению с полным напряжением на передающей катушке, так что выделить полезный сигнал на его фоне будет намного проще.
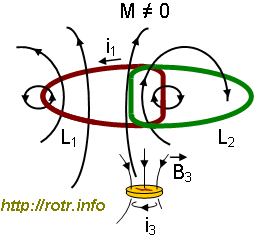
При приближении катушки к проводящему предмету, в нём за счёт переменного магнитного поля "передающей" обмотки, создаются вихревые токи, создающие своё переменное магнитное поле. Магнитный поток через "приёмную" обмотку уже оказывается ненулевым, в ней наводится ЭДС индукции, рис. %img:dd_f2. Иначе говоря, при наличии посторонних предметов, взаимная индуктивность изначально идеально сбалансированной системы оказывается отличной от 0. Сигнал с приёмной катушки усиливается, обрабатывается и используется для индикации и сигнализации об обнаружении объекта.
В приборах типа "передача-приём" также должна быть предусмотрена электронная компенсация для компенсации отклонения от 0 начальной взаимной индуктивности катушек вызванного несовершенностью изготовления, механической деформацией в процессе работы или любыми другими причинами. Электронная подстройка обеспечивает более точную установку "нуля" прибора, а значит более высокую чувствительность.
DD-катушки сложнее в изготовлении, но, в принципе, способны обеспечить несколько более высокую чувствительность металлоискателя по сравнению с индукционными металлоискателями с простой одинарной катушкой.
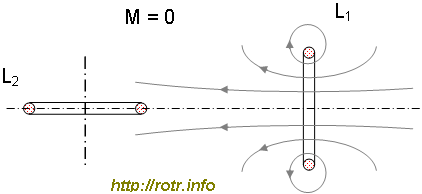
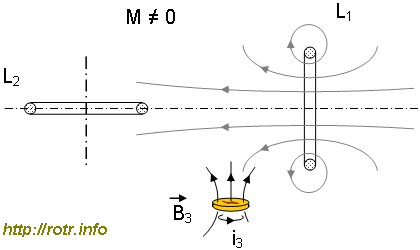
Рассмотрим ещё один вариант металлоискателя типа "передача-приём" (рис. %img:md_2c3d). Если расположим две катушки на штанге таким образом, что их оси окажутся взаимно перпендикулярными, то в свободном пространстве их взаимная индуктивность будет нулевой: при прохождении переменного тока через одну из катушек, её магнитный поток через вторую оказывается равным 0 и ЭДС индукции не наводится (рис. %img:md_2c1).
Но если рядом окажется проводящий предмет, переменное магнитное поле катушки с током создаст в предмете вихревые токи, магнитное поле которых наведёт ЭДС индукции в другой катушке (рис. %img:md_2c2).
Металлоискатели типа "передача-приём" с разнесёнными катушками предназначены для поиска крупных предметов на больших глубинах. Являются хорошей альтернативой не очень удобным в практическом использовании однокатушечным приборам, которые для увеличения глубины поиска должны быть оснащены катушкой очень большого диаметра. Следует иметь в виду, что у глубинных металлоискателей невелика чувствительность к мелким предметам, это общее свойство металлоискателей, как однокатушечных, так и двухкатушечных - с увеличением максимальной глубины поиска, увеличивается минимальный размер предмета, который прибор способен обнаружить. Мелкие объекты глубинный металлоискатель "не увидит" даже на поверхности.
В импульсных металлоискателях через катушку пропускаются короткие импульсы тока, создающие вокруг неё импульсное магнитное поле, под действием которого в проводящих предметах возникают вихревые токи. Когда завершается импульс тока через катушку и поле катушки "отключается", вихревые токи исчезают не сразу, а затухают в течение некоторого времени, создавая своё, убывающее со временем магнитное поле, которое наводит ЭДС индукции в катушке. По характеру изменения наведённого на катушке напряжения можно сделать выводы о наличии рядом посторонних предметов.
Импульсные металлоискатели имеют определённые достоинства. Так, они малочувствительны к влиянию почвы, в том числе сильно минерализованной и металлическому "мусору" типа обрывков фольги (и другим объектам с малым соотношением индуктивность/активное сопротивление из-за быстрого затухания вихревых токов).
В целом, между импульсными и индукционными металлоискателями больше общего, чем может показаться с первого взгляда. По сути, в импульсных металлоискателях анализируется сигнал-отклик во временной области, а в индукционных - в частотной. Теоретически, оба подхода эквивалентны. Практически, хорошие индукционные приборы, работающие одновременно на нескольких частотах, по возможностям способны несколько опередить своих импульсных конкурентов.