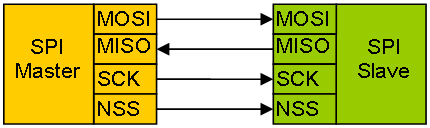
Рис. %img:stm_c1. Типичный вариант подключения устройства по SPI.
| [Home] | [Donate!] [Контакты] |
| [<< UART и USART. COM-порт. Часть 2] | [SPI в STM32. Работа в ведомом и ведущем режимах >>] |
SPI (serial peripheral interface), последовательный интерфейс периферийных устройств - интерфейс, обеспечивающий полнодуплексную синхронную последовательную связь между устройствами; для связи используются четыре однонаправленные сигнальные линии (две линии данных - для передачи и приёма данных, тактовый сигнал и сигнал выбора "кристалла").
Рис. %img:stm_c1. Типичный вариант подключения устройства по SPI.
Что это означает?
Первоначально разработанный компанией Motorola, интерфейс SPI впоследствии получил очень широкое распространение. Он поддерживается многими периферийными устройствами, выпускаемыми как в виде модулей, так и в виде отдельных микросхем. В частности, это всевозможные средства отображения информации (текстовые и графические дисплеи); датчики; модули беспроводной связи и многое другое. Следует упомянуть микросхемы энергонезависимой памяти с интерфейсом SPI, применяемые для хранения данных, а также для хранения прошивок устройств (загружаемых в RAM память при каждом запуске; такой способ хранения довольно удобен с точки зрения выполнения обновления прошивки). Кроме того, поддержку SPI имеют SD/microSD карты - они способны работать в SPI-режиме и могут использоваться устройствами как накопители данных большого объёма.
Многие микроконтроллеры имеют аппаратную поддержку SPI, что существенно упрощает использование внешней периферии, подключаемой по данному интерфейсу. Благодаря интерфейсу, может быть существенно упрощена разработка устройства, если пойти по пути объединения готовых компонентов, обменивающихся данными по SPI.
Интерфейс SPI достаточно прост с точки зрения реализации. При наличии такого желания, интерфейс может быть без труда реализован как программно, так и аппаратно, в том числе на базе простейших логических схем.
Обобщённо, без привязки к конкретной реализации, данный интерфейс рассматривается в статье "SPI".
Здесь уделим внимание особенностям реализации SPI в микроконтроллерах STM, в том числе рассмотрим специфичные, редко используемые режимы работы. Для быстрого ознакомления с вопросами практического использования SPI, смотрите "Примеры использования SPI в STM32". 
Оглавление
В микроконтроллерах STM32 имеется поддержка SPI, разработчику предоставлена масса возможностей по гибкому конфигурированию интерфейса.
Естественно, что SPI может быть сконфигурирован для работы в качестве ведущего или ведомого устройства (в режиме ведущего устройства SPI является источником тактового сигнала SCK для ведомого устройства; соответственно, ведомое устройство получает тактовый сигнал от другого устройства, работающего в режиме ведущего). Интерфейс допускает конфигурации с несколькими ведущими устройствами. Кроме обычной полнодуплексной синхронной передачи по двум линиям, предусмотрена возможность передачи данных в одну сторону по одной линии; поддерживается полудуплексная связь по одной двунаправленной линии. Имеются средства для поддержки надёжной связи (CRC контроль целостности данных).
Рассмотрим подробнее эти и другие возможности SPI в микроконтроллерах STM32.
Предупреждение. Некоторые выводы устройств SPI1, SPI3 и выводы интерфейса JTAG могут иметь привязку к общим внешним выводам в некоторых моделях микроконтроллеров. Тогда для использования такого SPI можно:
- отключить JTAG, а для отладки использовать интерфейс SWD;
- отключить как JTAG, так и SWD интерфейс для автономных, не требующих отладки приложений.
Интерфейс SPI в микроконтроллерах STM32F100xx имеет следующие основные возможности.
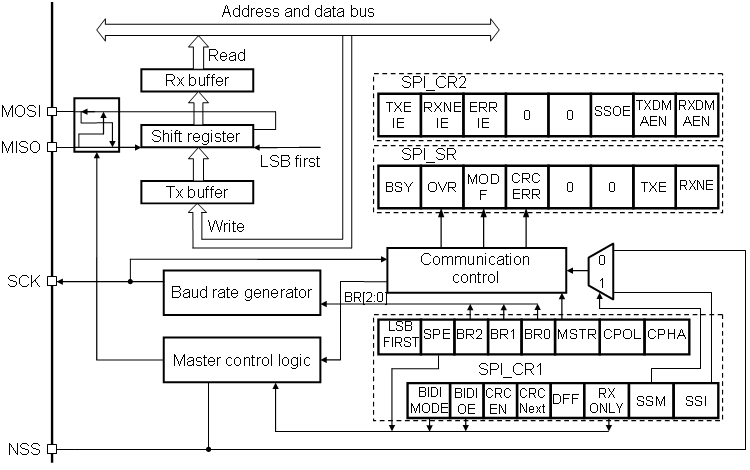
На рисунке %img:spi_bd изображена блок-схема SPI в микроконтроллерах STM32F100xx, а с учётом высокой степени совместимости разных семейств микроконтроллеров STM между собой, она применима и ко многим другим устройствам.
Обычно для подключения внешнего устройства к SPI используется 4 вывода.
У ведомого устройства вывод NSS - это вход, если выбран аппаратный режим NSS. Ведомое устройство может отказать от использования внешнего сигнала NSS и управлять своим выбором самостоятельно, программно (установкой бита SSI в регистре SPI_CR1 при установленном бите SSM). Это может быть хорошим решением в случае единственного ведомого устройства.
Вывод NSS ведущего устройства может быть входом (обычно используется при наличии нескольких ведущих устройств на шине) или выходом (только если на шине только одно ведущее устройство). Режим выхода для ведущего устройства включается установкой бита SSOE (регистр SPI_CR2). В таком случае, на выходе NSS ведущего устройства устанавливается низкий уровень, когда начинается обмен данными и остаётся на низком уровне до отключения SPI. NSS как выход довольно бесполезен: если ведомое устройство одно, зачастую можно обойтись вообще без сигнала NSS; если ведомых устройств несколько, в любом случае необходимо наличие у ведущего устройства нескольких выводов NSS. А поскольку аппаратный вывод NSS только один, то всё равно потребуется формирование нужного количества сигналов NSS программными средствами с использованием стандартных портов ввода-вывода.
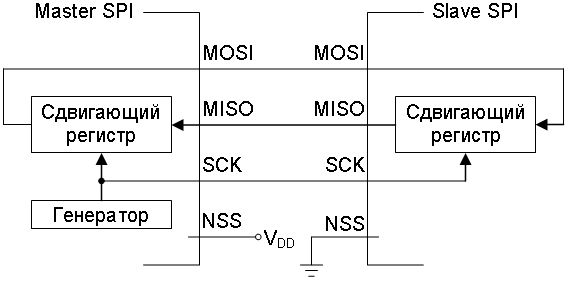
Пример варианта соединения между единственным ведущим и единственным ведомым устройством изображён на рис. %img:inter2. Здесь у обоих устройств вывод NSS сконфигурирован как вход. Ещё проще настроить NSS ведущего устройства как выход и оставить его неподключённым.
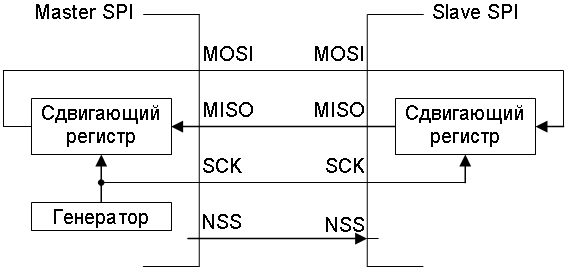
Типичный вариант подключения, когда задействованы все линии интерфейса, изображён на рис. %img:inter3. Здесь NSS является выходом у ведущего устройства и входом у ведомого, выбор ведомого осуществляется низким уровнем сигнала NSS.
Как видно из рисунков, для подключения по SPI, одноимённые выводы объединяемых устройств подключаются вместе (выводы MOSI устройств соединяются вместе, выводы MISO соединяются вместе, выводы SCK соединяются вместе). Использование NSS зависит от того, каким образом сконфигурированы устройства.
Данные передаются между ведущим и ведомым устройством в последовательной форме, по одному биту. Обычно старший бит передаётся первым, но порядок можно программно настроить. Пересылку данных всегда инициализирует ведущее устройство. Когда ведущее устройство передаёт данные к ведомому через вывод MOSI, оно одновременно получает данные от ведомого устройства через вывод MISO. Таким образом реализуется полнодуплексная связь с синхронизацией и исходящих, и входящих данных одним и тем же тактовым сигналом, который формируется ведущим устройством на выводе SCK.
Преобразование данных из параллельной формы, в которой данные пересылаются по шине микроконтроллера, в последовательную форму для передачи через SPI, осуществляется с помощью регистра сдвига, Shift register на рис. %img:spi_bd. Данные, предназначенные для передачи через SPI, загружаются в этот регистр из буферного регистра Tx. Когда завершается передача-приём очередного фрейма по SPI и полученный фрейм оказывается в регистре сдвига, содержимое регистра сдвига помещается в буферный регистр Rx. Программный доступ к регистрам осуществляется посредством регистра SPI_DR: при записи в него, данные помещаются в Tx; при чтении из регистра, получаем данные из Rx.
Прежде чем выполнять запись в SPI_DR, следует убедиться в том, что установлен флаг TXE в регистре SPI_SR, который свидетельствует, что буфер Tx в данный момент пуст (помещённые в него ранее данные уже перемещены в регистр сдвига, либо никакие данные в него ещё не записывались). О том, что в регистре Rx содержатся новые данные, полученные по SPI, сигнализирует флаг SPI_RXNE.
Выбор ведомого устройства может осуществляться аппаратно или программно, в зависимости от значения бита SSM в регистре SPI_CR1.
Имеется четыре возможных варианта тактирования передаваемых данных, которые выбираются с помощью битов CPOL и CPHA в регистре SPI_CR1. Биты влияют на работу SPI как в ведущем, так и в ведомом режиме.
Бит CPOL контролирует полярность сигнала SCK, т.е. начальный (пассивный) уровень тактового сигнала, который он имеет до начала пересылки данных и в паузах между передачами. Этот уровень совпадает со значением бита: если бит сброшен, низкий уровень является начальным для тактового сигнала; если бит CPOL установлен, начальным является высокий уровень.
Бит CPHA контролирует фазу тактового сигнала. Если бит CPHA сброшен, то первый фронт сигнала на выводе SCK (нарастающий, если CPOL = 0; спадающий, если CPOL = 1) является первым стробирующим импульсом, по которому фиксируется первый передаваемый бит фрейма. Если бит CPHA установлен, то второй фронт на выводе SCK (спадающий, если CPOL = 0; нарастающий, если CPOL = 1) является первым стробирующим импульсом и фиксирует первый передаваемый бит данных.
Последующие биты фрейма также будут фиксироваться по нарастающим или спадающим фронтам тактового сигнала, в зависимости от комбинации битов CPOL и CPHA.
Для того чтобы была возможна связь между двумя устройствами, полярность и фаза тактового сигнала у них должны быть настроены одинаковым образом.
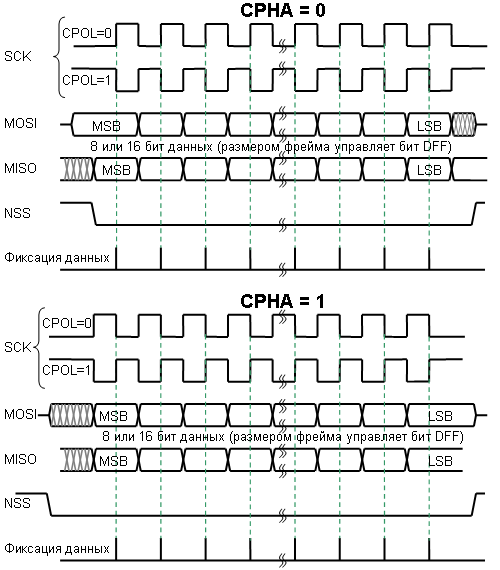
На рисунке %img:transfer приведены диаграммы процесса передачи данных при четырёх возможных комбинациях битов CPOL, CPHA. Диаграммы можно рассматривать как изображающие процессы на выводах как ведущего, так и ведомого устройства - одноимённые выводы устройств непосредственно соединены вместе и, естественно, сигналы на выводах совпадают.
Примечание. Изменять биты CPOL/CPHA допускается только при отключённом SPI (т.е. при сброшенном бите SPE). Поэтому, если необходимо изменить настройки тактового сигнала в процессе работы, сначала следует отключить SPI (о правильном отключении в разных режимах, без риска потери данных, смотрите: "Правильное отключение SPI"). Изменение настроек в процессе работы может потребоваться, например, если к одной SPI шине подключено несколько ведомых устройств, для которых необходимы разные варианты тактирования.
Хотя на рисунке показан случай, когда первым передаётся старший бит фрейма, установка бита LSBFIRST в регистре SPI_CR1 позволяет изменить порядок передачи битов (младший бит первым).
Имеется возможность выбора длины фрейма (8 или 16 бит) с помощью бита DFF в регистре SPI_CR1.
Понятно, что размер фрейма, порядок следования битов, а также параметры тактирования должны быть одинаковыми для ведомого и ведущего устройств, обменивающихся информацией. Скорость передачи настраивается только для ведущего устройства, для ведомого она определяется получаемым тактовым сигналом.
Смотрите далее:
SPI в STM32. Работа в ведомом и ведущем режимах